
丝杠垂直运动选型计算
在群里看到了这个表格,于是想研究一下,怎么最快上手电机选型
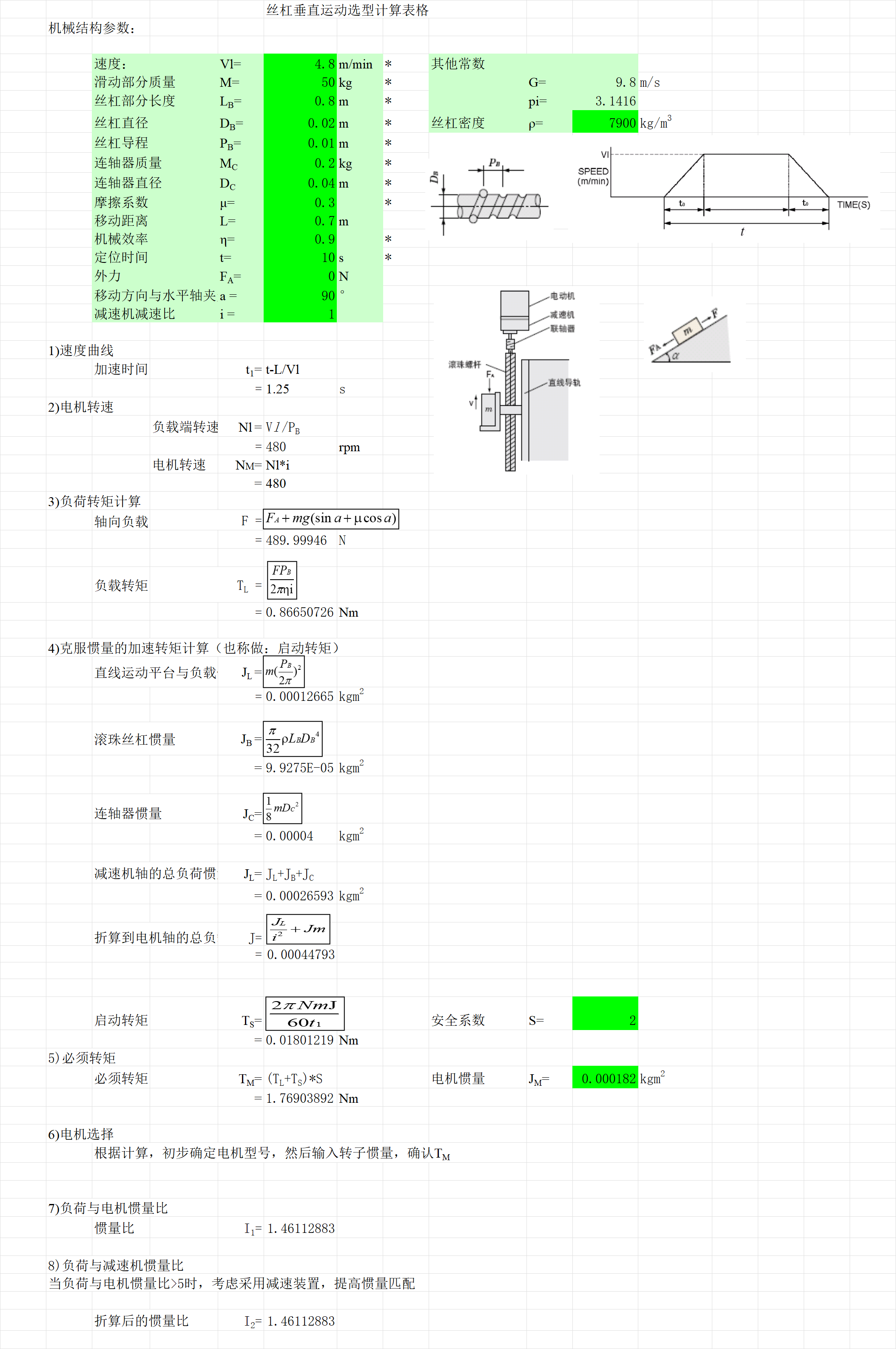
1.填入机械与运动参数:
滑动部分总质量(M):250.0 kg (包含本体和滑台底座)
最大移动距离(L):2.5 m (作业长度)
目标定位时间(t):3.0 s (工艺节拍要求,必须在3秒内走完这2.5米)
设定的最高线速度(Vl):60.0 m/min (即 1 m/s)
滚珠丝杠尺寸:长度(LB)= 3.0 m, 直径(DB)= 0.04 m, 导程(PB)= 0.02 m
传动与摩擦参数:减速机减速比(i)= 3.0, 机械效率(η)= 0.9, 导轨摩擦系数(μ)= 0.01
(额外向外的推力 FA 和倾斜夹角 a 均按 0 计算)
| 速度: | Vl= | 60 | m/min | |
| 滑动部分质量 | M= | 250 | kg | |
| 丝杠部分长度 | LB= | 3 | m | |
| 丝杠直径 | DB= | 0.04 | m | |
| 丝杠导程 | PB= | 0.02 | m | |
| 连轴器质量 | MC | 0.2 | kg | |
| 连轴器直径 | DC | 0.04 | m | |
| 摩擦系数 | μ= | 0.01 | ||
| 移动距离 | L= | 2.5 | m | |
| 机械效率 | η= | 0.9 | ||
| 定位时间 | t= | 3 | s | |
| 外力 | FA= | 0 | N | |
| 移动方向与水平轴夹角 | a = | 90 | ° | |
| 减速机减速比 | i = | 3 | ||
填完参数之后以下8个参数就有自动计算出数值了
| 1)速度曲线 | ||||||||||||||
| 加速时间 | t1= | t-L/Vl | ||||||||||||
| = | 0.5 | s | ||||||||||||
| 2)电机转速 | ||||||||||||||
| 负载端转速 | Nl = | Vl/PB | ||||||||||||
| = | 3000 | rpm | ||||||||||||
| 电机转速 | NM= | Nl*i | ||||||||||||
| = | 9000 | |||||||||||||
| 3)负荷转矩计算 | ||||||||||||||
| 轴向负载 | F = | FA+ | ||||||||||||
| = | 2449.99991 | N | ||||||||||||
| 负载转矩 | TL = | |||||||||||||
| = | 8.66508188 | Nm | ||||||||||||
| 4)克服惯量的加速转矩计算(也称做:启动转矩) | ||||||||||||||
| 直线运动平台与负载惯量 | JL = | |||||||||||||
| = | 0.00253302 | kgm2 | ||||||||||||
| 滚珠丝杠惯量 | JB = | |||||||||||||
| = | 0.00595647 | kgm2 | ||||||||||||
| 连轴器惯量 | JC= | |||||||||||||
| = | 0.00004 | kgm2 | ||||||||||||
| 减速机轴的总负荷惯量 | JL= | JL+JB+JC | ||||||||||||
| = | 0.00852949 | kgm2 | ||||||||||||
| 折算到电机轴的总负载惯量 | J= | |||||||||||||
| = | 0.00871149 | |||||||||||||
| 启动转矩 | TS= | 安全系数 | S= | 2 | ||||||||||
| = | 5.47360424 | Nm | ||||||||||||
| 5)必须转矩 | ||||||||||||||
| 必须转矩 | TM= | (TL+TS)*S | 电机惯量 | JM= | 0.000182 | |||||||||
| = | 28.2773722 | Nm | ||||||||||||
| 6)电机选择 | ||||||||||||||
| 根据计算,初步确定电机型号,然后输入转子惯量,确认TM | ||||||||||||||
| 7)负荷与电机惯量比 | ||||||||||||||
| 惯量比 | I1= | 46.8653371 | ||||||||||||
| 8)负荷与减速机惯量比 | ||||||||||||||
| 当负荷与电机惯量比>5时,考虑采用减速装置,提高惯量匹配 | ||||||||||||||
| 折算后的惯量比 | I2= | 46.8653371 | ||||||||||||
1)速度曲线 (加速时间 t1)
什么意思: 机器从完全静止,加速到设定的最高运行速度,所需要花费的时间。
用在哪里 (PLC 组态): 直接用于西门子 TIA Portal 或其他 PLC 的轴工艺对象(Technology Object)配置中。在“动态默认值”或“动态限制”里填入这个时间,能确保 PLC 下发的运动曲线既能满足生产节拍,又不会让电机因加速过猛而报错。
2) 电机转速 (NM)
什么意思: 为了在规定时间内跑完设定的距离,电机输出轴必须达到的最高旋转速度。
用在哪里 (硬件选型): 用于挑选伺服电机的额定转速。例如,表格算出的NM=9000rpm,这时候就会发现没有9000rpm的电机,说明这套机械传动不合理,必须改减速比或丝杠导程,否则买不到合适的电机。把减速比改为1,NM=3000rpm这时才会有符合要求的电机
方案A:把减速机拿掉,采用 $i=1$ 直连,电机转速降为 3000 rpm(刚好压着电机极限)。方案B:把丝杠导程换大一点,比如换成 $PB=0.04m(转一圈走40mm),减速比降为2,这样电机只需 1500×2 = 3000 rpm,运行会更健康。
你去查西门子 V90 手册时,就必须选择额定转速为 3000 rpm 的电机系列(高惯量系列通常只有 2000 rpm,此时就需要重新评估机械传动比)。
3) 负荷转矩计算 (TL / 轴向负载 F)
什么意思:
- 轴向负载 F:顺着移动方向的直线推力或拉力。
负载转矩 TL: 机器在匀速运转时,为了克服导轨摩擦力、重力等常态阻力,电机需要持续输出的旋转力气。
用在哪里 (硬件选型):
4) 克服惯量的加速转矩计算 (TS / 启动转矩)
什么意思: 物理学规律是“万事开头难”。静止的工件、丝杠、皮带轮都有惯性,想在极短时间内把它们“拽”动并加速到最高速,需要一个瞬间爆发的巨大力量。这个步骤就是把所有机械部件的惯量折算到电机轴上,算出的爆发力就是
TS。用在哪里 (硬件验证): 这是算出最终峰值扭矩的前置条件。
5) 必须转矩 (TM)
什么意思:
TM = (匀速负载转矩 TL + 加速爆发转矩 TS) × 安全系数 S。这是你的设备在最恶劣工况下(急加速瞬间)需要的绝对最大扭矩。用在哪里 (硬件选型): 拿着这个
TM值去对照伺服电机手册里的最大扭矩(峰值扭矩)。手册上的最大扭矩必须大于表格里的TM,否则电机在每次启动时都会报“过载(Overload)”故障。
6) 电机选择
什么意思: 这是一个验证区。当你用前 5 步的数据去手册里挑中了一款候选电机后,把这款电机的内部参数(如转子自身惯量 JM)抄下来,填进这个区域。
用在哪里 (设计迭代): 用于触发下面第 7 和第 8 步的最终判决。看看你挑的这款电机,到底能不能稳稳地带得动这套机械。
7) 负荷与电机惯量比 (I1 或 N1)
什么意思:
机械总惯量 ÷ 电机自身转子惯量。* 用在哪里 (评估控制稳定性): 这是决定设备“会不会发抖、停得准不准”的生死线。行业铁律:这个比值最好 < 5(高动态要求需 < 3)。
看看你上传的“丝杠水平运动”表格,这里的
I1居然高达 211.7!这意味着机械惯量是电机的 200 多倍,如果直接用电机直连(不加减速机),这台设备跑起来绝对会剧烈震荡,PLC 会疯狂报警。
8) 负荷与减速机惯量比 (I2)
什么意思: 针对第 7 步惯量比严重超标的补救措施。加上减速机后,折算到电机上的惯量会以减速比的平方($i^2$)大幅缩小。
用在哪里 (机械结构整改): 告诉你加了减速机之后,系统稳不稳。
在你上传的“丝杠水平运动”表中,哪怕加了 3.0 的减速比,折算后的惯量比
I2依然高达 23.5。工程结论: 这表明当前的机械设计依然极不合理,23.5 的惯量比对大部分伺服来说依然很难调试。你需要建议机械工程师继续加大减速比(比如换成 i=5 或 i=10),或者更换自身转子惯量(JM)更大的高惯量伺服电机。
总结一下:
扭矩和转速决定了你的设备**“能不能动、动得快不快”**。
惯量比决定了你的设备**“定位准不准、停得稳不稳”**。
轴向负载和运动方向决定了你的设备在断电时**“会不会掉下来砸人”**。
接下来是写程序
买回来的电机装好后,接下来就是要在西门子博图(TIA Portal)或者其他 PLC 里进行工艺对象(Technology Object,简称 TO)的轴组态。这时候你需要从表格的机械结构参数区和速度曲线区里抄数据:
丝杠导程 (PB) / 皮带轮直径 (D) / 分度盘参数
对应 PLC 组态: TO轴配置里的 “机械 (Mechanics)” -> 负载位移 (Load displacement per motor revolution)
作用: 告诉 PLC,电机转一圈,实际机械走了多少毫米或多少度。
减速机减速比 (i)
对应 PLC 组态: TO轴配置里的 “机械 (Mechanics)” -> 电机与负载的传动比 (Motor/Load)
作用: 告诉 PLC,电机转几圈,减速机输出轴才转一圈(例如填入 3 : 1)。
设定的速度 (Vl 或 V)
加速时间 (t0 或 t1)
定位距离 (L) 或 定位角度
对应 PLC 编程: 你在 OB1 或 FC 里调用
MC_MoveRelative或MC_MoveAbsolute等运动控制功能块时,填入管脚Distance或Position的设定值。
总结成一句口诀: “选型看底层结果(看扭矩、转速、算惯量),PLC抄顶部机械(抄导程、减速比、填加减速时间)。”


